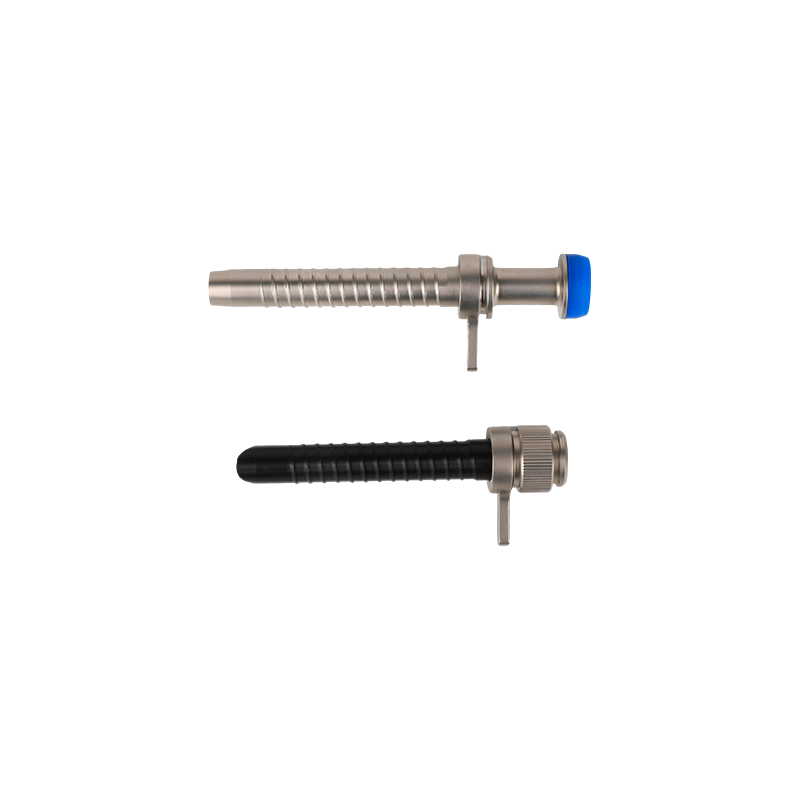
Имеет ли эндоскопическая рабочая канюля механизм контроля гибкости во время использования?
Дизайн
эндоскопические рабочие канюли часто включает в себя механизмы контроля гибкости во время использования. Эти механизмы предназначены для улучшения маневренности и навигации по сложным анатомическим структурам во время эндоскопических процедур. Вот некоторые распространенные способы контроля гибкости эндоскопических рабочих канюль:
Советы по артикуляции:
Некоторые эндоскопические рабочие канюли имеют шарнирные наконечники, которыми может управлять хирург. Это позволяет точно регулировать угол насадки, обеспечивая гибкость и адаптируемость во время процедуры.
Механизмы сгибания и разгибания:
Стержень эндоскопической рабочей канюли может иметь механизм сгибания и разгибания, обеспечивающий контролируемый изгиб. Хирурги могут манипулировать степенью сгибания или разгибания, чтобы обходить препятствия или достигать определенных областей.
Валы переменной жесткости:
Некоторые эндоскопические рабочие канюли имеют стержни переменной жесткости. Жесткость можно регулировать, чтобы обеспечить баланс между жесткостью и гибкостью, обеспечивая оптимальный контроль в зависимости от процедурных требований.
Управляемые канюли:
Некоторые эндоскопические рабочие канюли имеют управляемую конструкцию, которая позволяет хирургу направлять канюлю по заранее заданному пути. Эта функция повышает гибкость канюли во время навигации.
Управление вращением:
Эндоскопические рабочие канюли могут иметь функции, позволяющие контролировать вращение рабочего кончика. Такое управление вращением способствует повышению маневренности в различных направлениях.
Встроенные ручки управления:
Канюля может иметь встроенную ручку управления, которая позволяет хирургу манипулировать гибкостью канюли руками. Эта ручка обеспечивает удобный интерфейс для регулировки формы канюли во время процедуры.
Сплавы с памятью формы:
Некоторые эндоскопические рабочие канюли содержат сплавы с памятью формы, такие как нитинол. Эти сплавы могут возвращаться к заданной форме при воздействии определенных раздражителей, что позволяет канюле быть гибкой во время введения и возвращаться в более жесткое состояние в правильном положении.
Регулируемая пользователем гибкость:
В некоторых конструкциях гибкость эндоскопической рабочей канюли регулируется пользователем. Хирурги могут изменить гибкость в зависимости от конкретных требований процедуры или анатомических характеристик пациента.
Системы дистанционного управления:
Усовершенствованные эндоскопические рабочие канюли могут быть оснащены системами дистанционного управления, которые позволяют хирургу регулировать гибкость с помощью внешнего управления. Это особенно полезно в процедурах, где важен точный контроль.
Системы обратной связи:
Некоторые эндоскопические рабочие канюли оснащены системами обратной связи, которые предоставляют хирургу информацию об уровне применяемой гибкости. Эта обратная связь помогает гарантировать, что канюля будет реагировать должным образом во время процедуры.